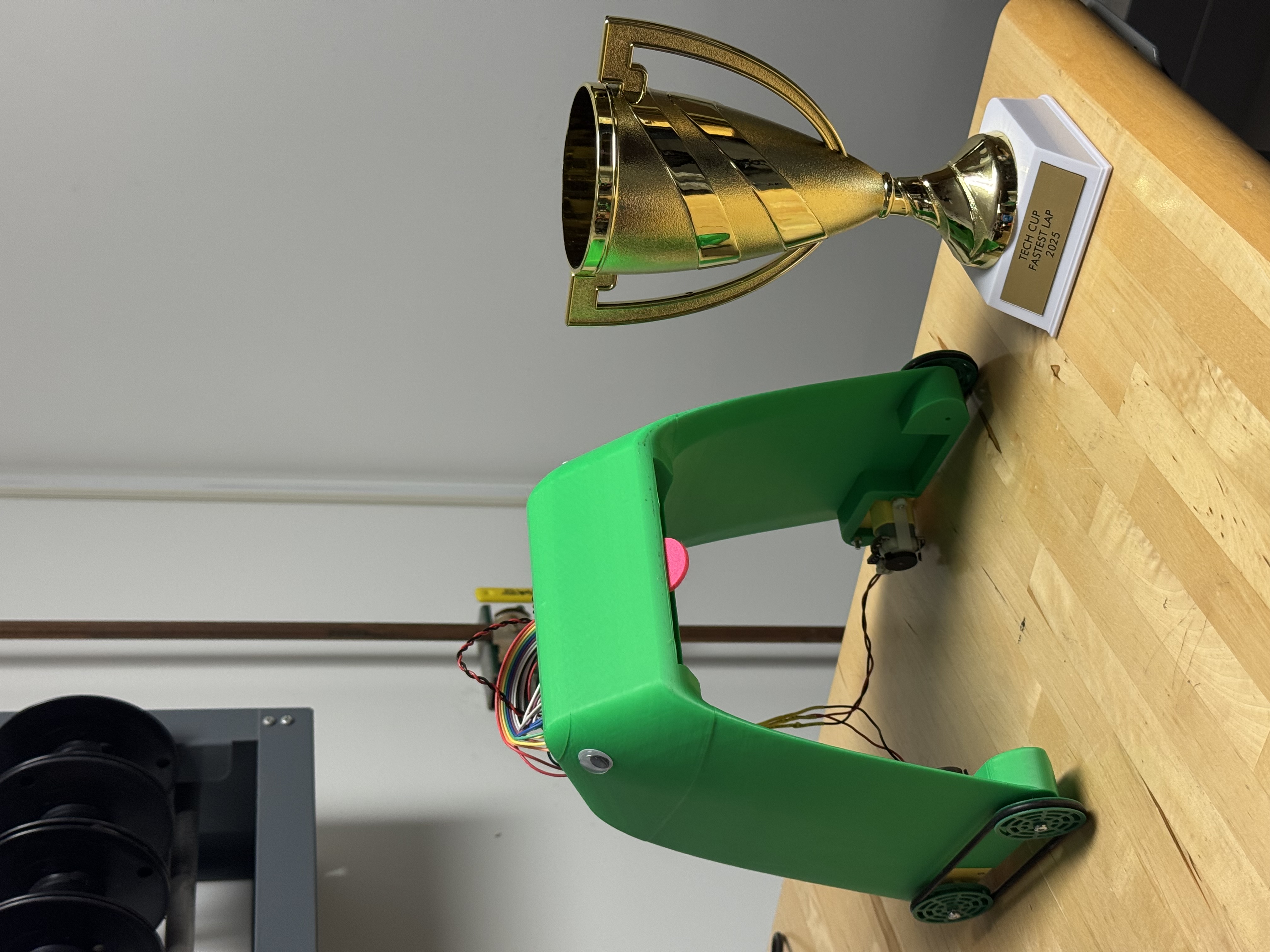

KERMIT is a low-level computer vision line following robot that I built as the final project for a graduate-level mechatronics class. The project won first place in the class competition for the fastest robot to go one loop around the course.
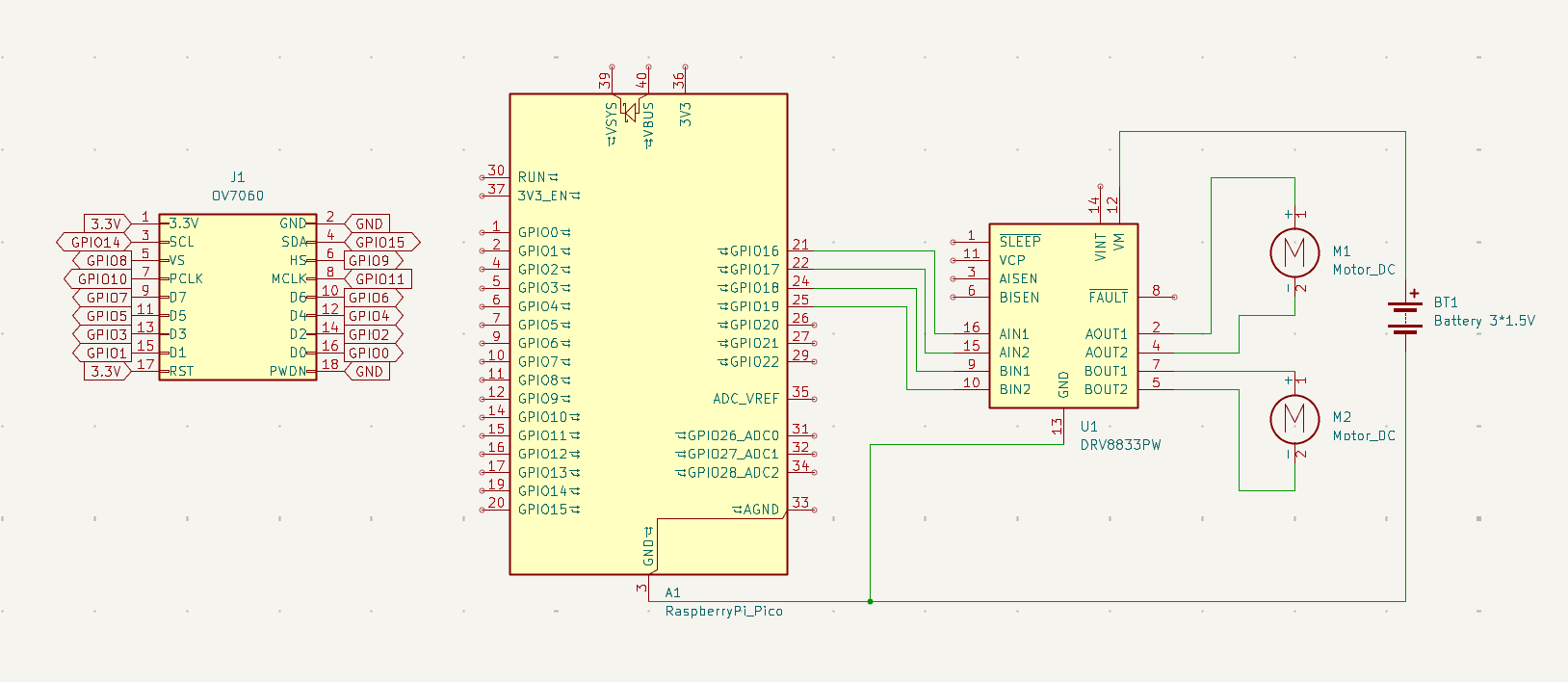
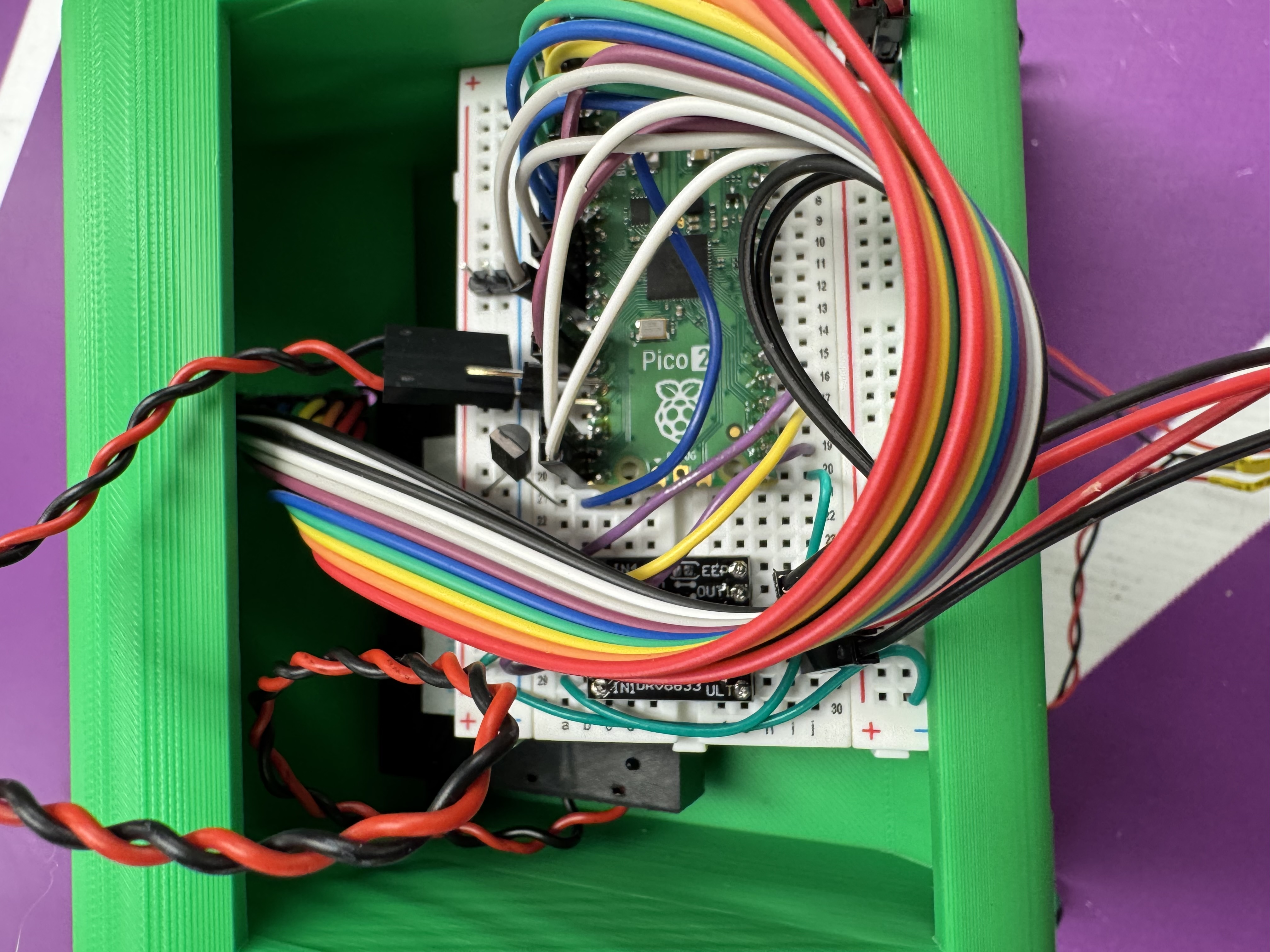
KERMIT is powered by dual belt-driven DC motors, controlled by a Raspberry Pi Pico running firmware written in the C SDK. A simple PID controller is used to maintain a constant distance from the line, while a camera mounted on the front of the robot captures the horizontal position of the line and sends it to the Pico over I2C.
The firmware averages the captured image into a line of pixels, it then calculates the center of mass of the line’s brightness and uses that to calculate the error for the PID controller.