PULSE is the first project for the Creative Engineering and Robotic Arts Studio (CERAS) at Northwestern University, a group I founded near the end of Freshman year. Our goal is to challenge the utilitarian nature of engineering and robotics and to explore the intersection of art and technology.
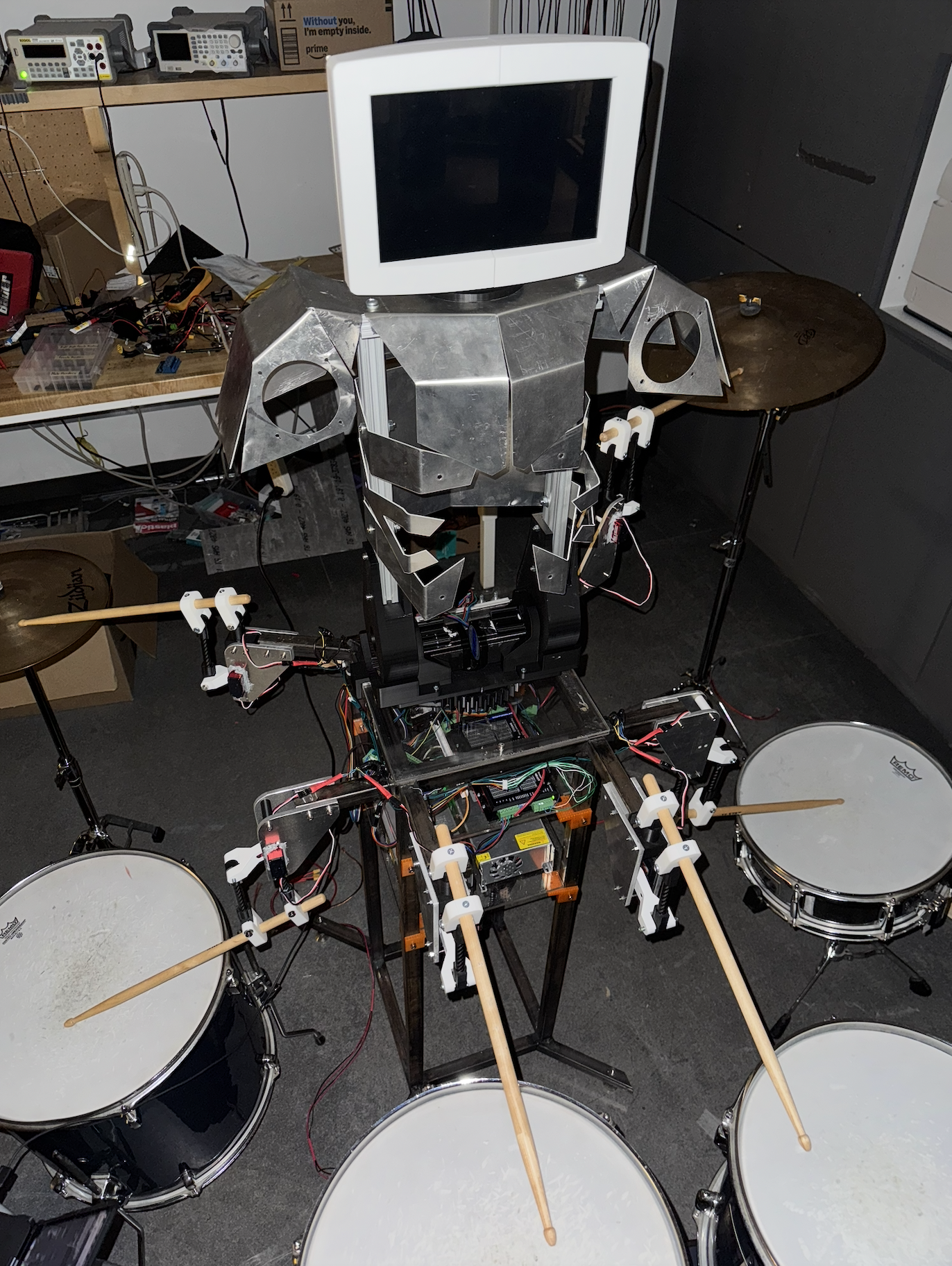
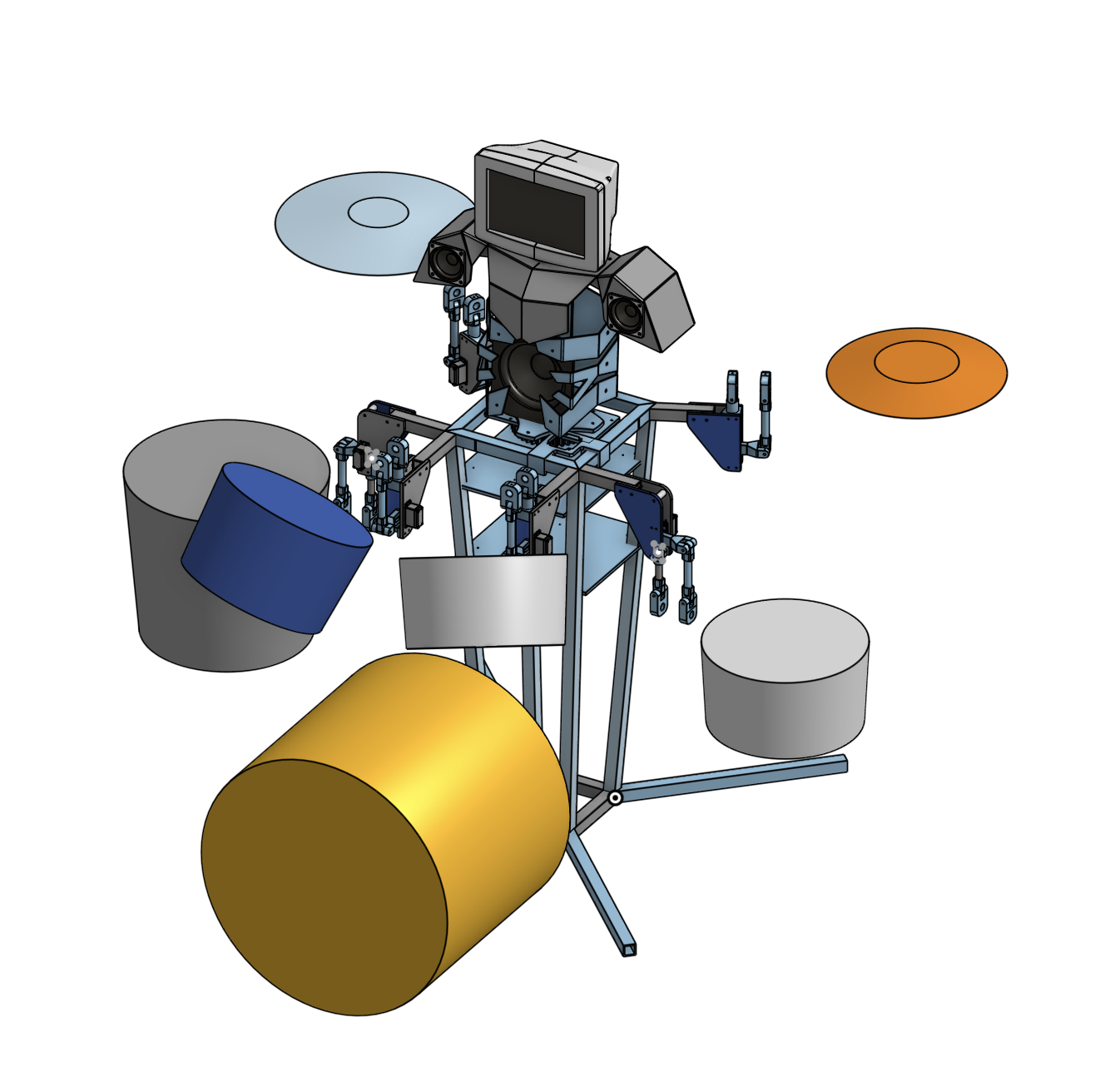
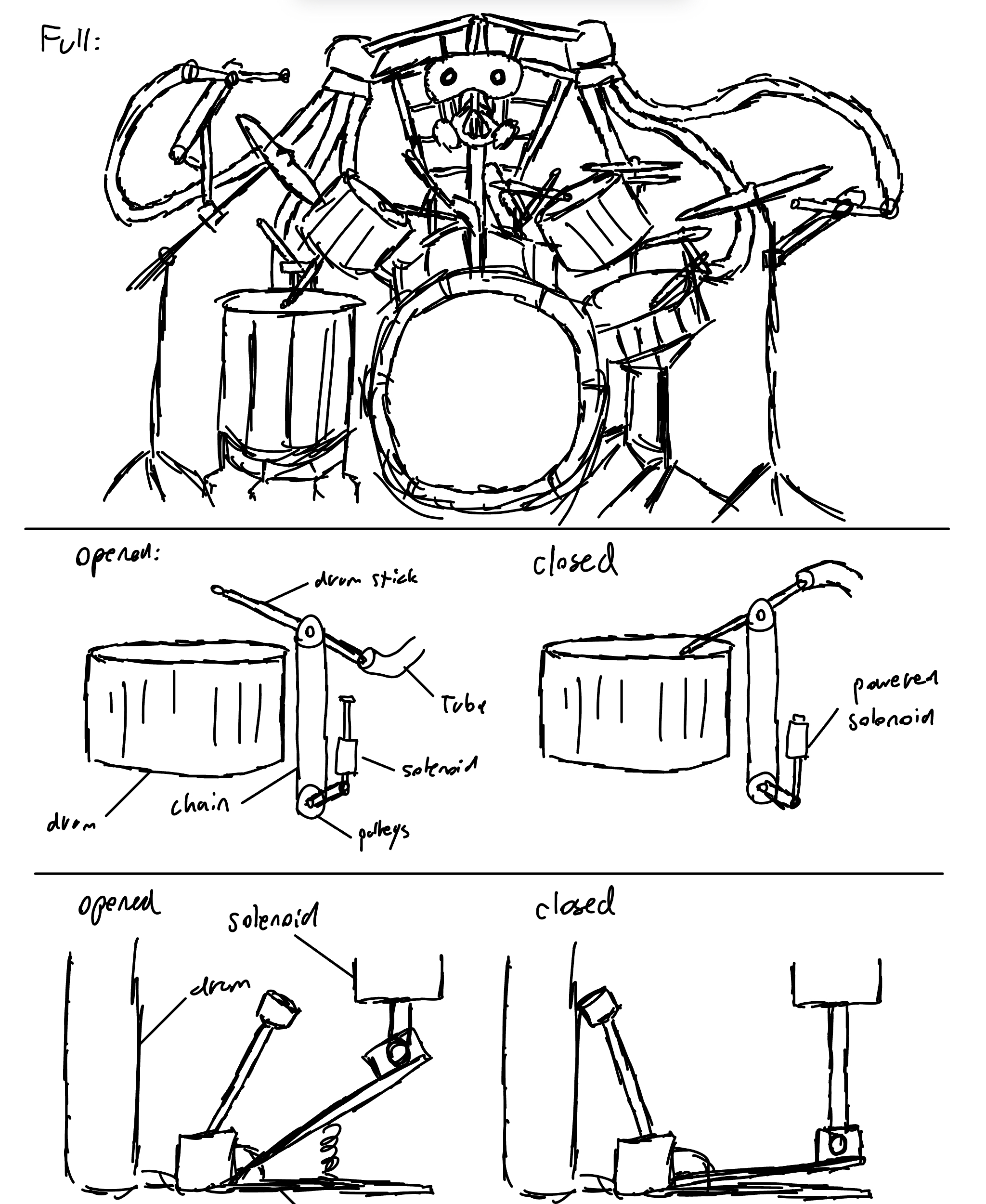
The robot has a welded stainless steel base, 7 servo-actuated arms, 2 solenoid actuated kicks, 3 stepper motors, 3 speakers, and an LCD screen face, all coordinated by a microcontroller and raspberry pi communicating through I2C.
What started as an ambitious eight-month build turned into a test of resilience: parts shortages, firmware conflicts, machining errors, even shifting team dynamics. Yet when PULSE finally took the stage at our debut performance, the sense of fulfillment was indescribable.