TORIN was inspired by a method of locomotion used by amoebas called Whole Skin Locomotion, where they move by pulling in the skin near the front of their body and expelling it out the back. You can imagine it as a torus endlessly turning itself inside-out, a seamless loop of surface motion generating forward movement.
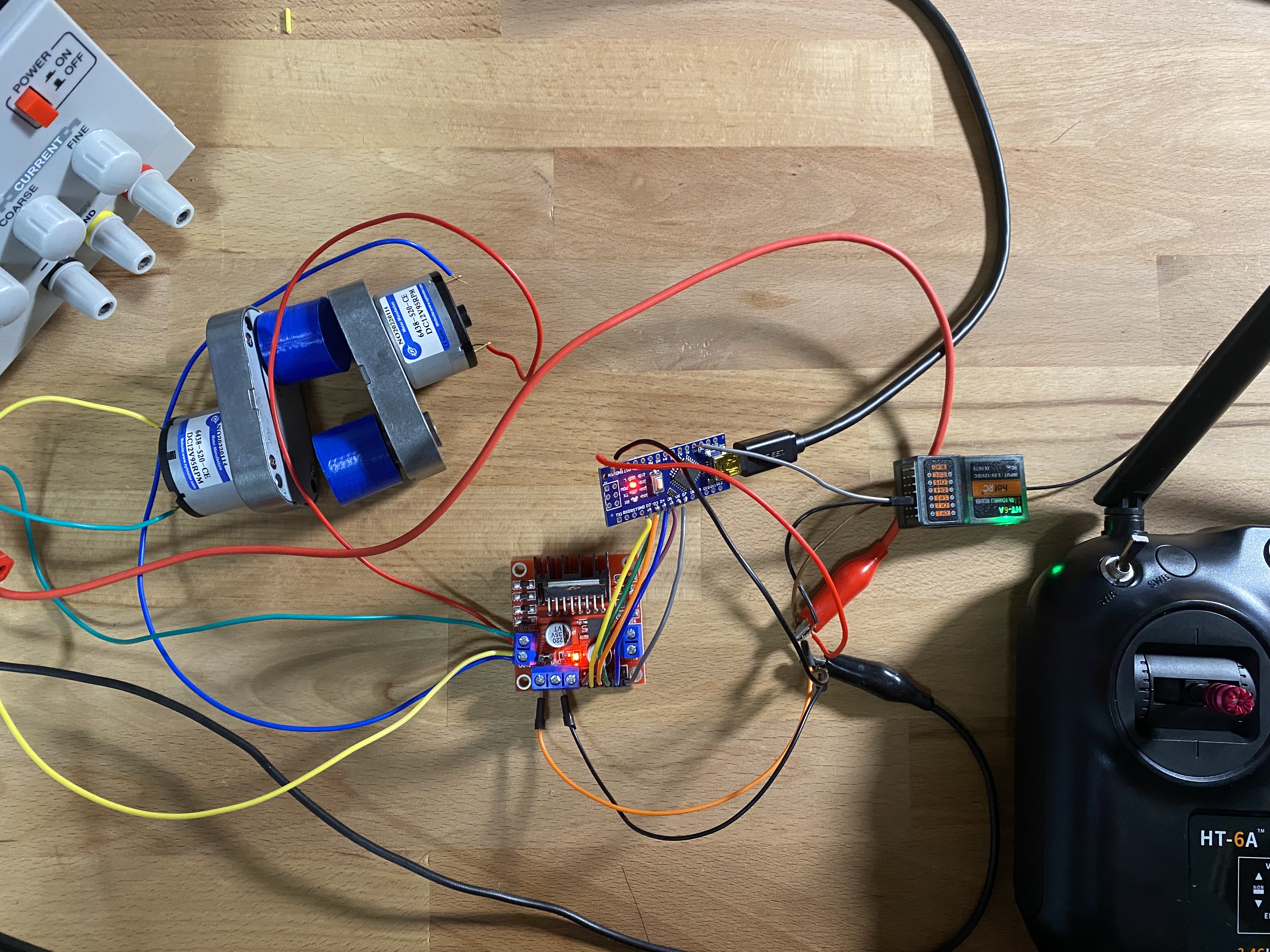
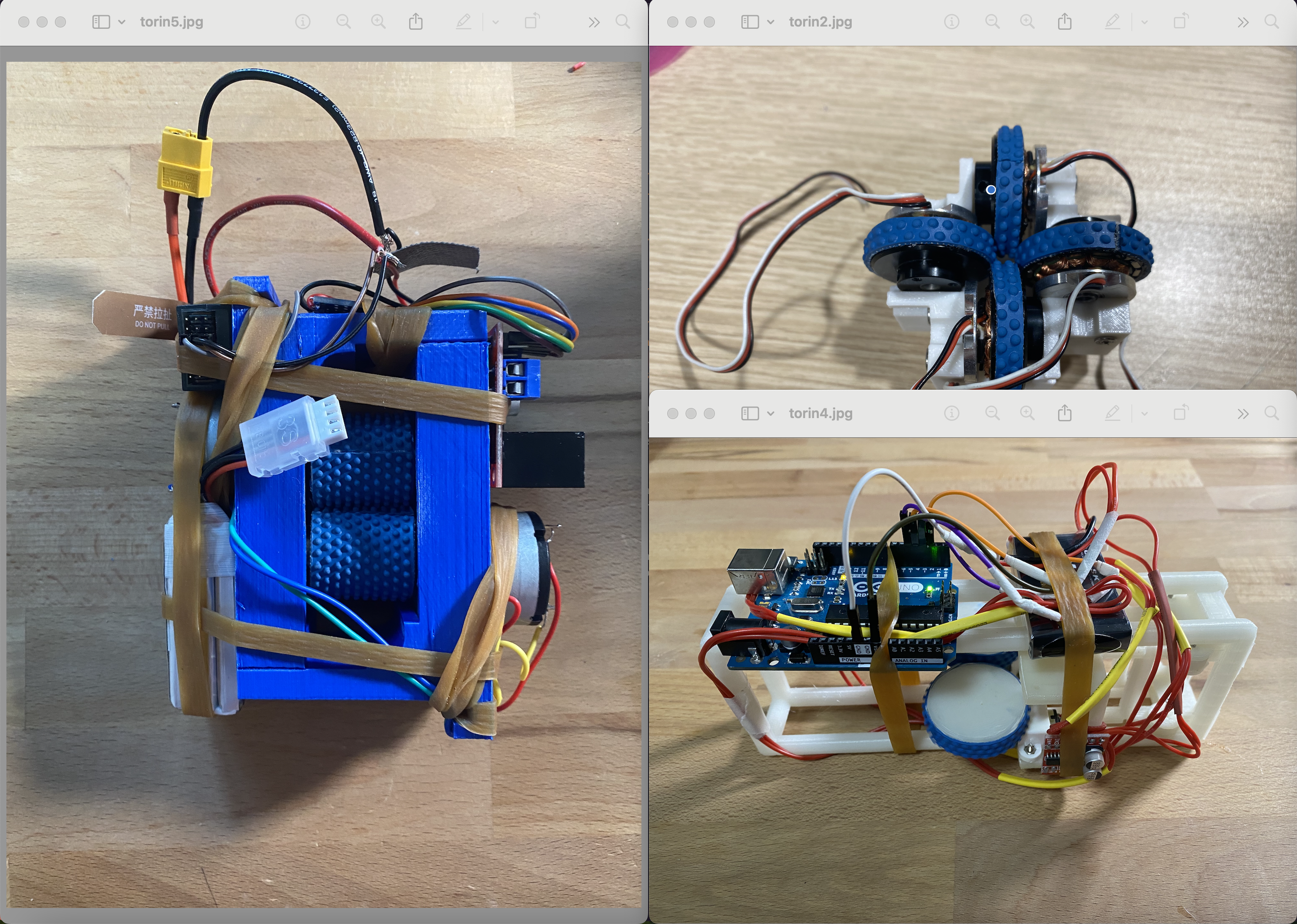
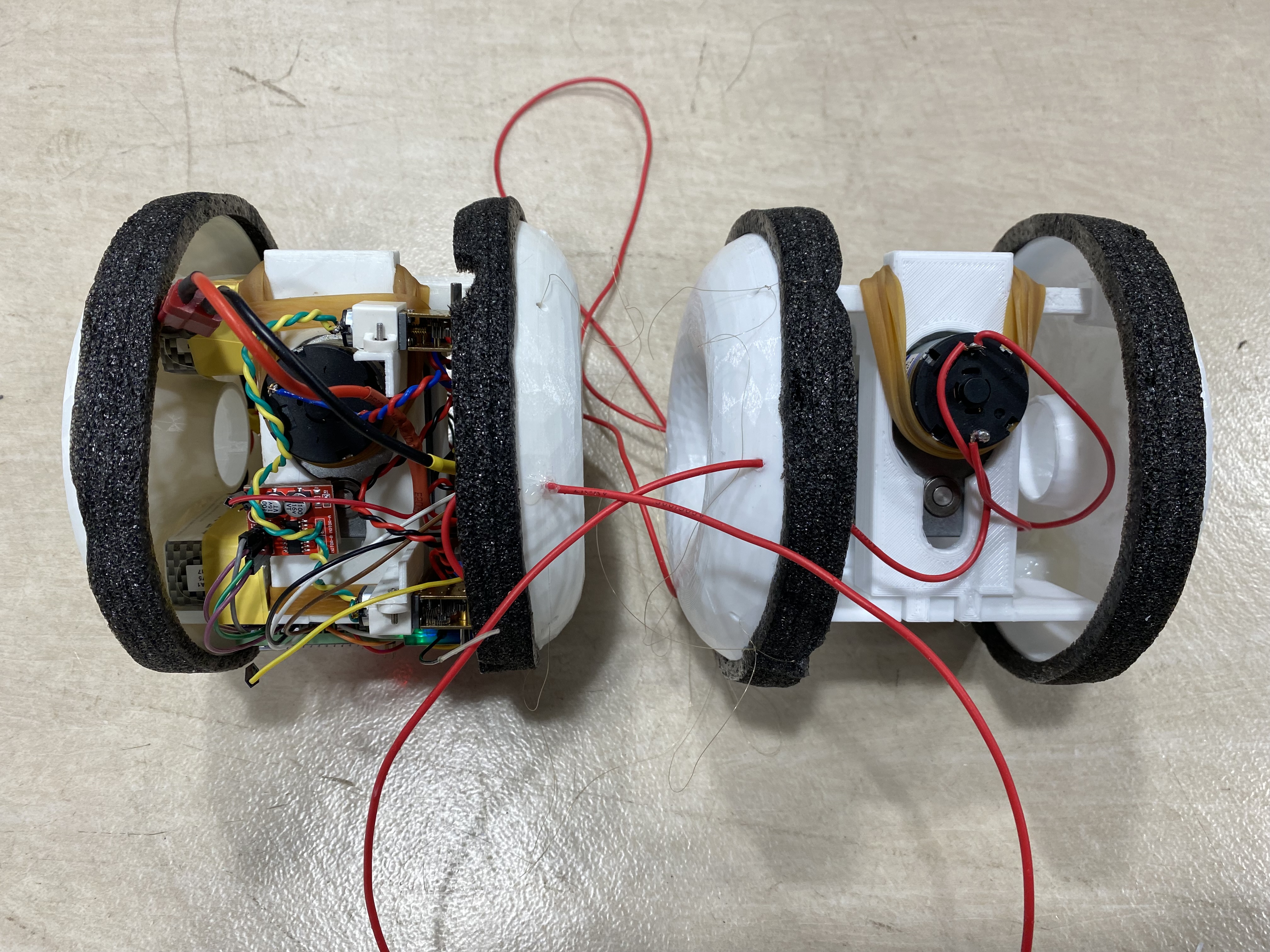
My robot does exactly that. Four motors are mechanically pressed agains a tubular plastic membrane, which is then flipped inside out to wrap around the whole body of the robot. When the motors are turned on, the membrane is pulled inwards by a front chassis while expelled outwards by a rear chassis, generating forward movement. Steering is done by four chords between the two chassis that are pulled in or out using 4 additional motors, allowing the robot to turn left or right.
The robot is able to move at a spee of 10cm/s and can squeeze through holes half it’s cross-sectional area.